物理智能是云端与现实世界之间的直接连接。FieldBots 通过在物理环境中运行的机器人进行学习,并据此对硬件进行反馈。这一层不仅展示遥测数据,还能解读行为、协调设备并执行机群规则,从而确保基于硬件实际情况的决策能够自动执行。
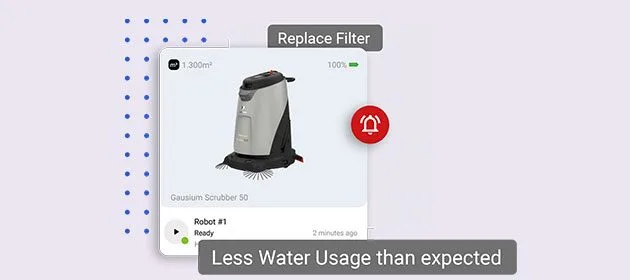
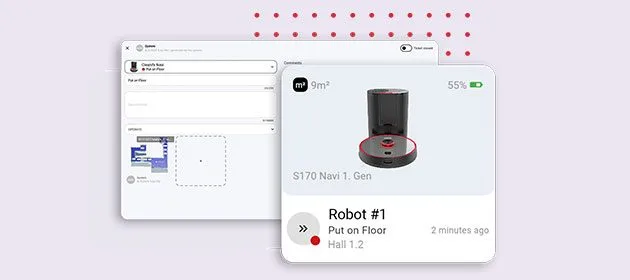
行为监控系统在机器人固件之上构建了一层抽象的行为感知层。该系统评估用水量、能耗及清洁面积产出等性能指标,并将偏离预期行为的情况转化为主动警报,使操作员能在效率低下演变为停机前及时介入。
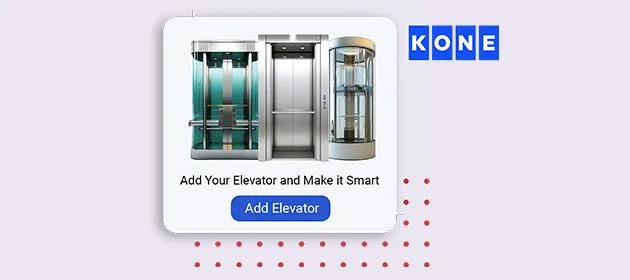
机器人与电梯之间的通用集成层。电梯协调系统通过提供供应商中立的桥梁,消除了众多机器人与电梯制造商间的集成摩擦。依托我们与通力在德奥瑞地区(DACH)的合作,分销商和集成商无需为每台设备定制工程,即可协调垂直移动解决方案。

通过整合 Level 3 集成机器人的实时地图,生成一张统一的操作地图。FieldBots 将各机器人的地图合并为一份全面的平面图,使操作员能够跨设备和区域绘制虚拟围墙及禁入区域。机群 从孤立测绘向统一空间智能的机群 。
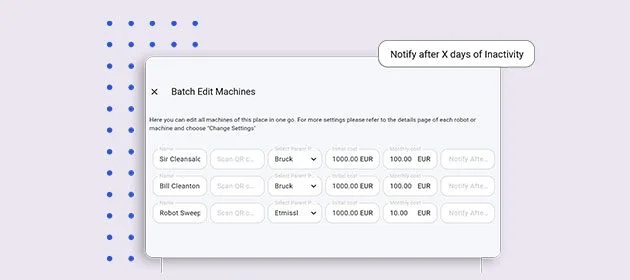
机群和批量接入。通过“批量配置”功能,运维人员可以设置全团队范围的行为规则和计划。新设备会自动继承机群 ,而批量编辑功能则将配置管理提升到机群 ,而非设备层面。
Big Data Intelligence 通过收集 FieldBots 云平台上的众包数据,生成基准指标、财务预测及生命周期估算。经过匿名处理的对比分析,能够揭示机群 机型相较于全球同类群体的表现,并挖掘出运营商仅凭孤立数据无法察觉的优化与商业机遇。
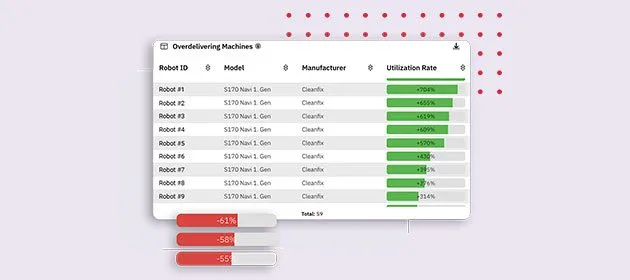
通过比较基准评估性能。利用率基准可显示相较于全球FieldBots网络中同型号设备,当前机器人是否发挥了其应有潜力。表现优于基准表明部署优化;表现低于基准则指向需立即改进的领域。
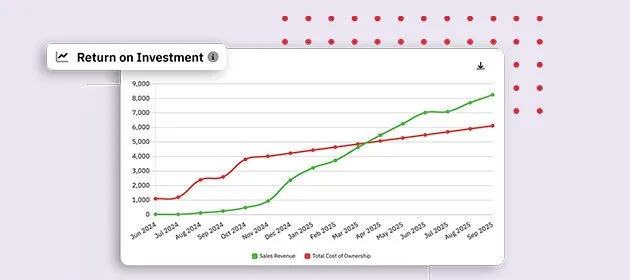
实际性能转化为实际收益。投资回报率(ROI)计算综合考虑了采购成本、运营成本、运行时间以及每平方米或每平方英尺的单价,从而预测单台机器人、机群整个运营体系的盈亏平衡点。计算结果为管理者和客户提供基于时间的盈利能力视图。
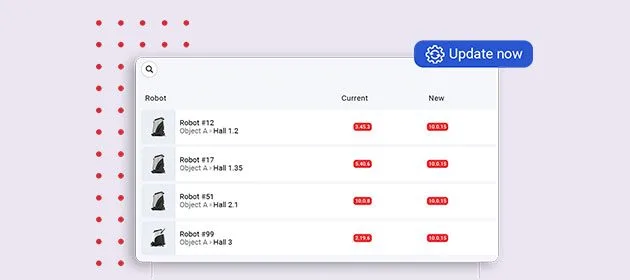
固件健康与漂移的全球视图。固件雷达跨型号和运营商映射固件版本,呈现实验性、当前及过时版本。这种可视性有助于保障安全性、导航质量,并为已购硬件解锁新功能。
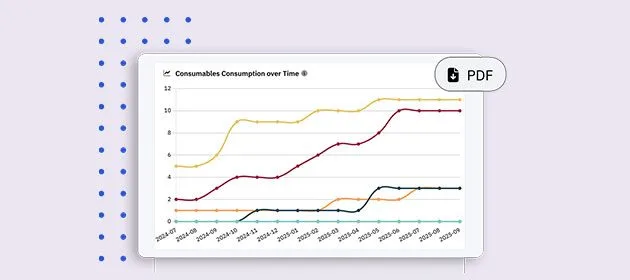
耗材预测性磨损分析。通过将运行时间与记录的更换数据相关联,FieldBots可估算刷头、刮板、吸嘴等部件的使用寿命。这些估算结果有助于实现更精准的成本核算、减少浪费,并强化ESG与可持续发展报告。
代理智能是迈向机群 的第一步。它从物理智能和大数据智能中采集信号,从而代表操作员提出建议或在获得授权时执行操作。通过“主动加入”控制机制,既确保了人工监督,又实现了可扩展的自动化工作流。
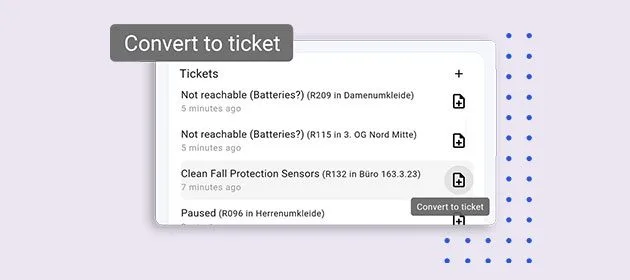
当机器人报告卡顿时,该代理会自动提交工单。每份工单都包含报告位置的地图快照,即使机器人已被移动,团队也能诊断重复故障点。该功能使反复出现的障碍物可视化并可采取行动。
主动维护助手。该代理程序会监控状态变化和使用模式,随后向维护人员提出针对性建议——例如重新连接丢失的设备、执行即时维修或安排预防性维护工作。所有建议均可通过单次操作转换为工单。
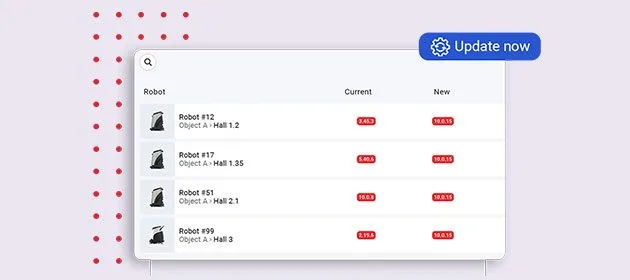
自动、及时的固件更新。基于Firmware Radar,该代理程序可在对三级集成机器人影响较小的时段触发固件部署,或通过指定经销商请求更新。其目标是在无需人工协调的情况下,确保机群 最安全、功能最完善的软件状态。
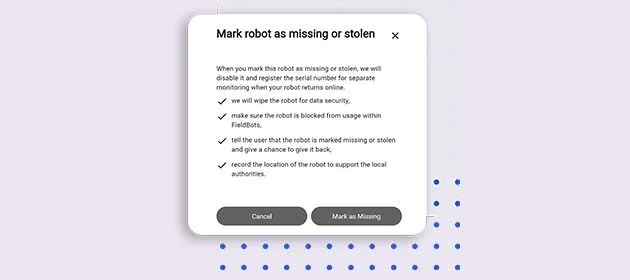
恢复与安全监控器。标记为丢失或被盗的设备将被持续监控,以检测后续的重新连接尝试。当设备重新出现时,该代理程序将捕获其位置及连接元数据,以便后续追回或配合执法部门调查,同时阻止未经授权的重新连接直至身份验证完成。
随着 FieldBots 6.0 的发布,我们正在开启机群 全新篇章。敬请观看我们的首席执行官亚历山大·费尔(Alexander Feil)为您详细介绍即将为 FieldBots 用户带来的强大新工具,并阐述 FieldBots Intelligence 如何改变机群 方式。